Littering has been a growing issue across the globe. Its impact in various contexts cannot be understated, which led researchers to try several solutions. Dedicated cleanups, prevention and spreading awareness are commonly used techniques to reduce litter; however, these solutions have notable flaws. Thus, my thesis focuses on a fourth technique: large scale behaviour change. Specifically, it targets one of the most important factors for behaviour change: the belief to perform the required actions to produce a specific outcome, referred to as self-efficacy.
It is hypothesized that perceiving the visualized actions of others combined with physically seeing litter can aid in creating a sense of self-efficacy. One method of visualizing actions is AR, which is rather unexplored within the field of environmental sustainability. To test the effectiveness of AR for creating a sense of self-efficacy for picking up litter, I have developed two prototypes of a mobile application named FlowerPower. Both prototypes are based on Bandura's self-efficacy theory and incorporate two factors important for creating a sense of self-efficacy: vicarious experiences and performance accomplishments. Within the context of my research, vicarious experiences refer to litter pick-ups performed by others, whereas performance accomplishments refer to one's own litter pick-ups. It should be noted that the focus is on vicarious experiences, whereas performance accomplishments are only loosely incorporated.
The first prototype is called AR mode and utilizes AR to show litter pick-ups in the form of digital flowers. Users may playce their own flower after picking up a piece of litter, which can be seen by other users. The following video shows a small demo:
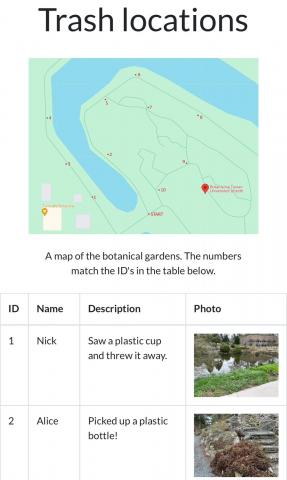
The second prototype is called list mode: this is a basic representation of popular map-like approaches, such as the NLschoon kaart. List mode contains a list of user-placed comments and a map with markers. Each marker corresponds with a comment, indicating the location at which the comment was placed. The following picture shows the map and a few comments:
An experiment was conducted to compare the aforementioned prototypes. It is hypothesized that AR mode provides a more complete picture of vicarious experiences, thus resulting in a greater sense of self-efficacy. Furthermore, both prototypes were tested in an inside environment and during a walk, resulting in three different conditions: AR-out, LIST-out and LIST-in. It is hypothesized that using FlowerPower outside results in a greater level of self-efficacy, as it allows users to physically see litter while using FlowerPower. This would shorten the psychological distance between the user and the litter problem, consequently leading to a greater sense of self-efficacy. Potential self-efficacy changes were measured using a pre- and post-questionnaire; the results were analyzed by applying a two-way ANOVA to the questionnaire answers.
The results show no significant differences in self-efficacy ratings between conditions. I reasoned that perceiving the actions of others is not enough by itself to generate more self-efficacy for picking up litter; furthermore, the evidence regarding the effects of physically seeing litter is inconclusive. However, analysis of the pre- and post-questionnaire showed that the use of FlowerPower slightly increased participants’ sense of self-efficacy in all conditions. Hence, I concluded that both prototypes have potential, should other important factors for self-efficacy be incorporated.